WORKING TO IMPROVE HUMAN HEALTH AND PERFORMANCE
In Biomechanics, testing is often done in a controlled setting using motion capture. However, kinematics in real world environments differ from those in lab environments and these systems don’t allow for day-to-day monitoring of kinematics. For example, you could bring in an elderly person for testing on slip-fall cases but this wouldn’t be as valuable as having this data tracked in the person’s day to day lives. That's where our work comes into play.
|

|

|
|
abstract
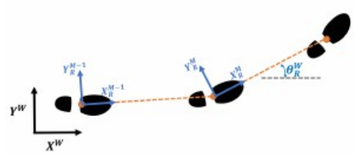
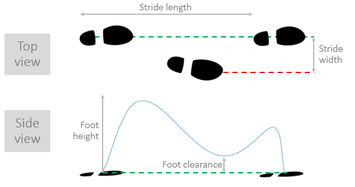
Inertial measurement units are an increasingly attractive option for measuring human kinematics in naturalistic environments. Zero-velocity update (ZUPT) based foot trajectory estimates have been demonstrated to yield accurate estimates of individual foot stride metrics; however, there is an absence of literature establishing techniques to fuse individual foot trajectories to obtain estimates of stride parameters that rely on knowing the positions of both feet (e.g. stride width, base of support). In this project, an Extended Kalman Filter was developed to fuse individual foot trajectory estimates calculated using position estimates obtained from a well-validated ZUPT-based algorithm and range measurements between the legs obtained from an ultrasonic sensor. The algorithm was validated and demonstrated accurate estimation of stride width during normal human walking.
report & presentation
| ekf_stride_width_report.pdf |
| ekf_stride_width_presentation.pdf |
videos
|
|
|
